 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edgeevomap: A Toolbox for Dynamic Mapping in Python
Nov 06, 2025



This paper presents evomap, a Python package for dynamic mapping. Mapping methods are widely used across disciplines to visualize relationships among objects as spatial representations, or maps. However, most existing statistical software supports only static mapping, which captures objects' relationships at a single point in time and lacks tools to analyze how these relationships evolve. evomap fills this gap by implementing the dynamic mapping framework EvoMap, originally proposed by Matthe, Ringel, and Skiera (2023), which adapts traditional static mapping methods for dynamic analyses. The package supports multiple mapping techniques, including variants of Multidimensional Scaling (MDS), Sammon Mapping, and t-distributed Stochastic Neighbor Embedding (t-SNE). It also includes utilities for data preprocessing, exploration, and result evaluation, offering a comprehensive toolkit for dynamic mapping applications. This paper outlines the foundations of static and dynamic mapping, describes the architecture and functionality of evomap, and illustrates its application through an extensive usage example.
Latency Overhead of ROS2 for Modular Time-Critical Systems
Jan 12, 2021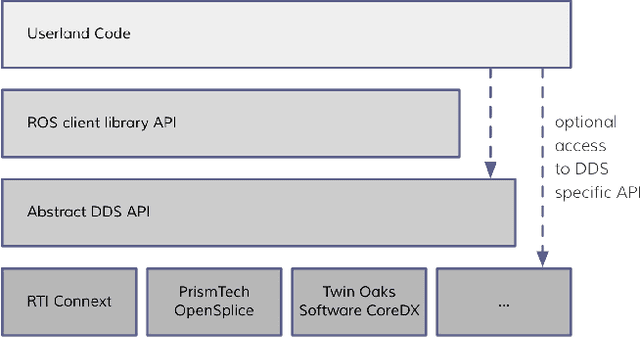
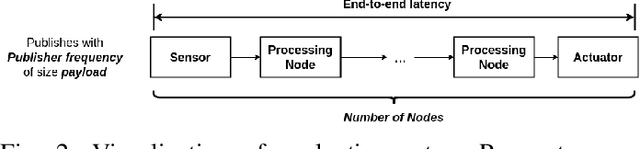
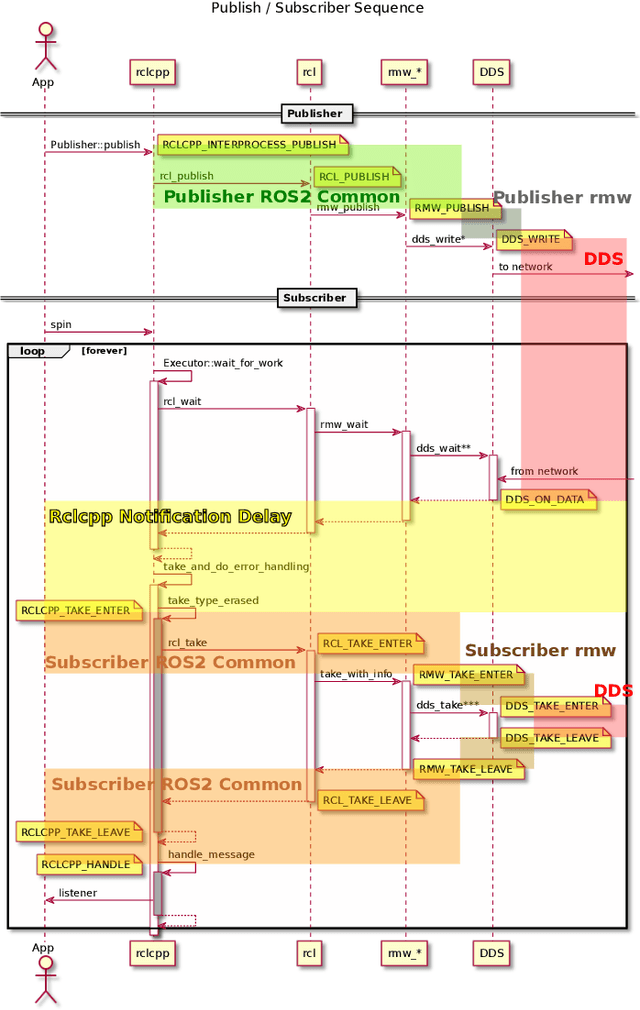
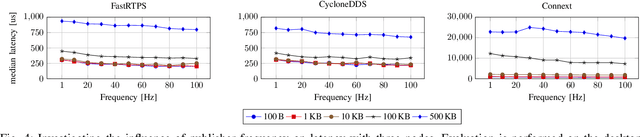
Robot Operating System 2 (ROS2) targets distributed real-time systems. Especially in tight real-time control loops, latency in data processing and communication can lead to instabilities. As ROS2 encourages splitting of the data-processing pipelines into several modules, it is important to understand the latency implications of such modularization. In this paper, we investigate the end-to-end latency of ROS2 data-processing pipeline with different Data Distribution Service (DDS) middlewares. In addition, we profile the ROS2 stack and point out latency bottlenecks. Our findings indicate that end-to-end latency strongly depends on the used DDS middleware. Moreover, we show that ROS2 can lead to 50 % latency overhead compared to using low-level DDS communications. Our results imply guidelines for designing modular ROS2 architectures and indicate possibilities for reducing the ROS2 overhead.